









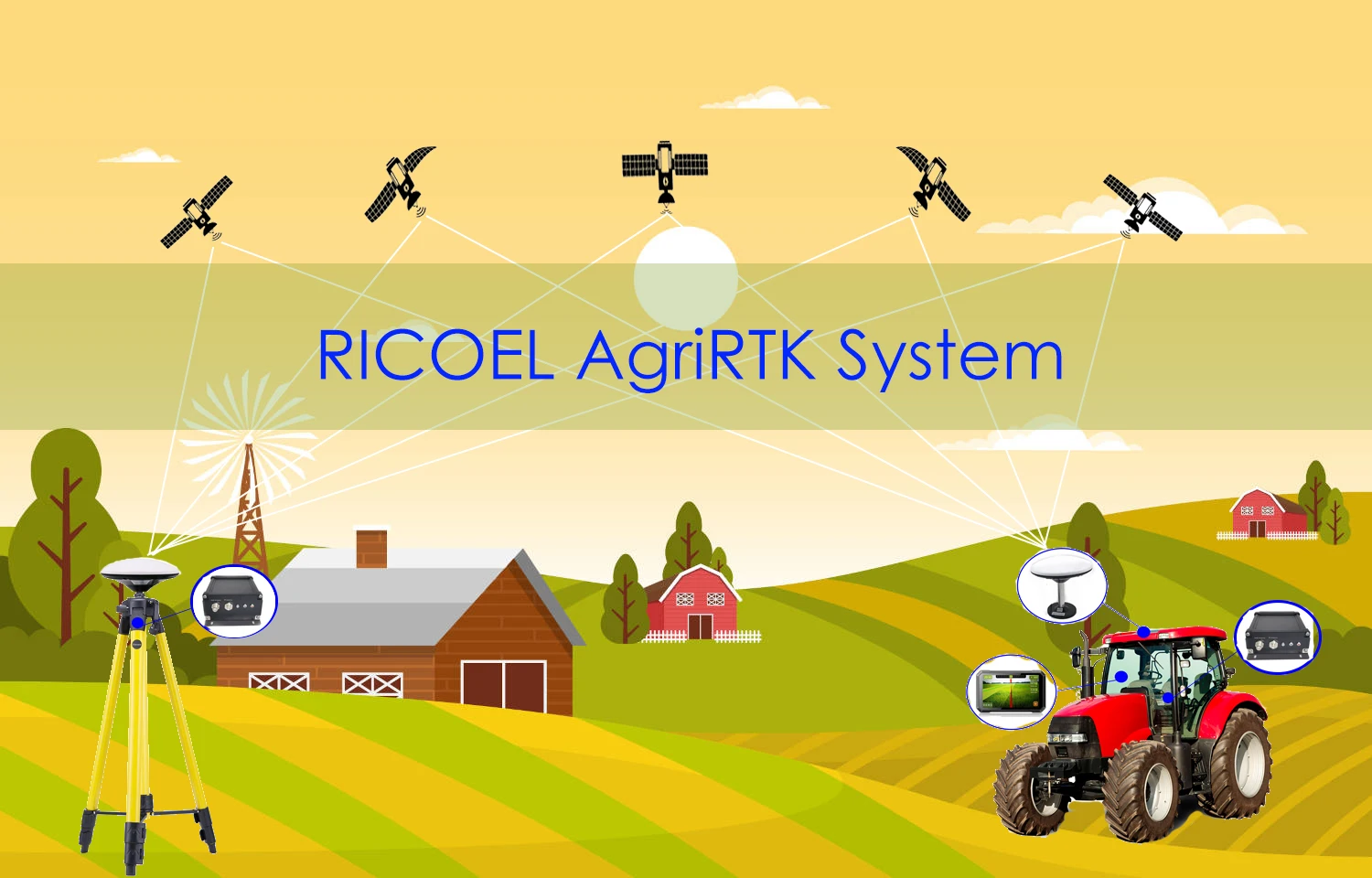
Il sistema è composto da una base locale AgriRTK stazione di AgriBase in o vicino al campo che trasmette correzioni per la rover stazione di iRover sul equipaggiato trattore. La stazione di base controlla la costellazione di satelliti GPS e continuamente calcola una posizione. Come il AgriBase non è in movimento, gli errori possono essere calcolato in tempo reale. Queste fluttuazioni vengono poi inviati per il trattore tramite il RF radio. Il trattore iRover delle utilizza queste informazioni per calcolare un
Posizione estremamente preciso e corretto. E poi il Campo Navigatore App in TG-7 più il tablet sarà ottenere i dati allo stesso tempo e la guida il trattore per lavorare in modo efficiente e con precisione.






